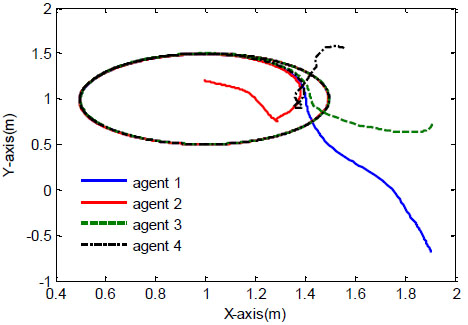
Fig. (13)
Tracking trajectories of MRMs by controller (43).