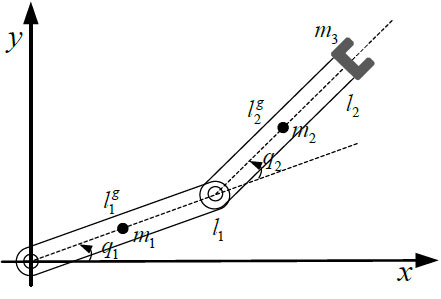
Fig. (7)
Architecture of two rigid-link robot manipulator.