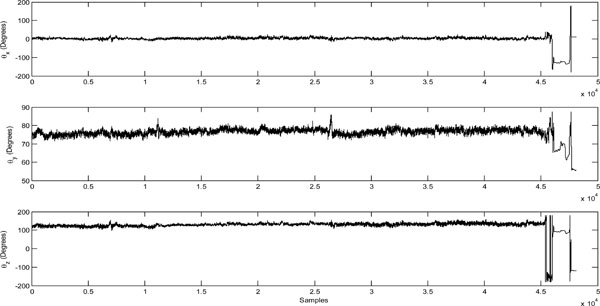
Fig. (3)
Roll, pitch and yaw angles provided by the Micro IMU.