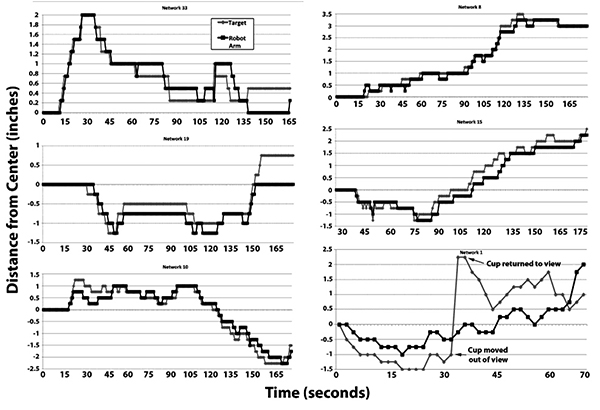
Fig. (3) Representative tracking of the target by the robot arm. Mov files of tracking were opened to an identical size, and a ruler was mounted below the on-screen image, with 0 representing the initial localization of the robot arm. Migration of the target and arm were quantified over the indicated time period. Migration was quantified using distance increments of 0.25”; + values indicate migration to the right, - values indicate migration to the left.