- Home
- About Journals
-
Information for Authors/ReviewersEditorial Policies
Publication Fee
Publication Cycle - Process Flowchart
Online Manuscript Submission and Tracking System
Publishing Ethics and Rectitude
Authorship
Author Benefits
Reviewer Guidelines
Guest Editor Guidelines
Peer Review Workflow
Quick Track Option
Copyediting Services
Bentham Open Membership
Bentham Open Advisory Board
Archiving Policies
Fabricating and Stating False Information
Post Publication Discussions and Corrections
Editorial Management
Advertise With Us
Funding Agencies
Rate List
Kudos
General FAQs
Special Fee Waivers and Discounts
- Contact
- Help
- About Us
- Search




The Open Mechanical Engineering Journal
(Discontinued)
ISSN: 1874-155X ― Volume 14, 2020
The Efficient and Tentative Model for Extenics Replications of the Moveable Robots
Koram Samuel Sakyi*, Jian-Fei Lu
Abstract
Background:
On the most elementary level, you and I (human beings) were created with five main mechanisms (or parts):
• A body which is termed as the main structure of the human being.
• A sensory system that takes certain information around the body and the immediate environment.
• A muscle system to aid the body move easily.
• A control base to trigger the muscles and sensors.
• A brain system that develops sensory data and tells the muscles what to do in other words the way forward.
Obviously, we likewise have some imperceptible qualities, for example, intellect and ethics, among others but on an absolute corporeal level. Robots, on the other hand, can be created with five main mechanisms or more.
Objectives:
This research aims at implementing robots in some tedious jobs that as supposed to be executed by human beings in various factories and industries. This study also presents the practical and tentative model for Extenics replications of the moveable mechanical device (robot) useful on VIPRO stage.
Methods:
Momentary antiquity and indication of the pertinent hypothetical ideas are provided. The intelligent boundary for drawn-out switch uses a novel element for synthetic intelligence which is drawn-out control (Extenics) to expand DHFPC switch rapid enactment of mobile robots.
Result:
Applying Extenics specific methods and application in vague interplanetary result in a novel, advanced application for the VIPRO stage which can be used to feign and device innovative switch approaches of moveable robots.
Article Information

Identifiers and Pagination:
Year: 2019Volume: 13
First Page: 1
Last Page: 8
Publisher Id: TOMEJ-13-1
DOI: 10.2174/1874155X01913010001
Article History:
Received Date: 31/10/2018Revision Received Date: 04/1/2019
Acceptance Date: 11/01/2019
Electronic publication date: 28/02/2019
Collection year: 2019
open-access license: This is an open access article distributed under the terms of the Creative Commons Attribution 4.0 International Public License (CC-BY 4.0), a copy of which is available at: (https://creativecommons.org/licenses/by/4.0/legalcode). This license permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
* Address correspondence to this author at the School of Civil Engineering and Mechanics, Jiangsu University, PO box 321, Zhenjiang, China; Tel: +8613878- 117571; E-mail: samuelkoram@yahoo.com
| Open Peer Review Details | |||
|---|---|---|---|
| Manuscript submitted on 31-10-2018 |
Original Manuscript | The Efficient and Tentative Model for Extenics Replications of the Moveable Robots | |
1. INTRODUCTION
A robot is created with very similar mechanisms. A distinctive robot has a movable body, a mechanical device, a sensor, a power source and a CPU “brain” that regulates all of these components. Fundamentally, robots are artificial forms of bodily life - they are machineries that imitate human and animal behavior or conduct.
In this study, we'll discover the elementary idea of robotics and discover how robots do what they do (in other words how they do their work).
Joseph Engelberger, an inventor in engineering robotics, on one occasion said “I can't describe a robot, but then again I can easily recognize one when I see one.” If you contemplate on all the diverse machines that most people consider as robots, you can realize that it's virtually incredible to discover an all-inclusive definition. That is to say, almost everyone has his or her own impression of what constitutes a robot.
You've perhaps heard of quite a few of these well-known robots:
- R2D2 and C-3PO: The intellectual, talking robots with loads of behavior in the “Star Wars” cinemas.
- Sony's AIBO: A mechanical dog that studies via human communication.
- Honda's ASIMO: A robot that can stroll on two legs as a human being does.
- Engineering robots: Mechanical machines that function on assembly lines.
- Statistics/ Data: The virtually human robot from “Star Trek”.
- Battle Bots: The remote control fighters on Comedy Central and so on.
All of these mechanical devices are regarded as robots, at least by a couple of individuals. The widest description around describes a robot as something that a lot of people know as a mechanical device. Most roboticists (that is the individuals who build robots) use a more detailed description. They stipulate that robots have a re-programmable intellect (a computer) that transports a body.
By this description, robots are distinctive from other movable machinery, for example, cars, due to their computer component. Several innovative cars do have an in-built computer, but it's only there to make minor alterations. You regulate most components in the car directly by means of several mechanical devices. Robots are different from everyday computers in their corporeal nature - standard computers don't have a bodily structure attached to them. In the subsequent segment, we'll explore the main components instituted in most robots today.
Extenics is an innovative hypothetical frame of substantial component in the global leading discipline, which launches the approach of unravelling conflicting glitches through the intelligent and inventive method in an official, scientific and rational technique.
The measurable apparatuses to resolve the automation clashing glitches grounded on allowance set of extension arithmetic are studied. Extension result approaches on robot switch area are completed by applying a sequence of all-inclusive approaches using allowance set and dependent function in edict to changes of area matter-elements or state matter-elements in uniformity rudiments and rubrics of intellectual reasoning. The robotics intellectual switch by allowance system and the elementary theories, edifice and values of allowance switch industrialized as the database, the features pattern recognition, blend of the dependent unit on specific conditions, the degree form recognition, the adaptive device, the device approaches as the central features of the device structural design.
Extenics was established by Cai Wen in 1983 and industrialized consecutively, with a key effect in the technical domain of the preceding few centuries through outcomes in e-learning, information mining, duplicate recognition, robotics, measurements and administrative investigation, among others [1C.Y. Yang, and W. Cai, Extension Engineering., Science Press: Beijing, .-4V. Vlădăreanu, P. Schiopu, M.C. Deng, and H.N. Yu, "Intelligent extended control of the walking robot motion", Proc. of the 2014 International Conference on Advanced Mechatronic Systems, IEEE: Kumamoto, Japan, pp. 489-495.
[http://dx.doi.org/10.1109/ICAMechS.2014.6911594] ]. Extension established concept is a calculated system for signifying ambiguity which is an allowance of the standard set system, with claims in numerous research areas [5K. Samuel, B. Korankye, and G. Kweitsu, "Seismic response analysis of underground structures", J. Enviro. Earth Sci, vol. 8, no. 5, pp. 48-63.]. Extenics is an area of education who targets are to unravel clashing glitches, as is the instance of location - power switch in the arena of robotics, mechatronics and factual period switch.
2. VIPRO STAGE DESIGN
The mechanical elucidation for the innovative stage offered in Fig. (1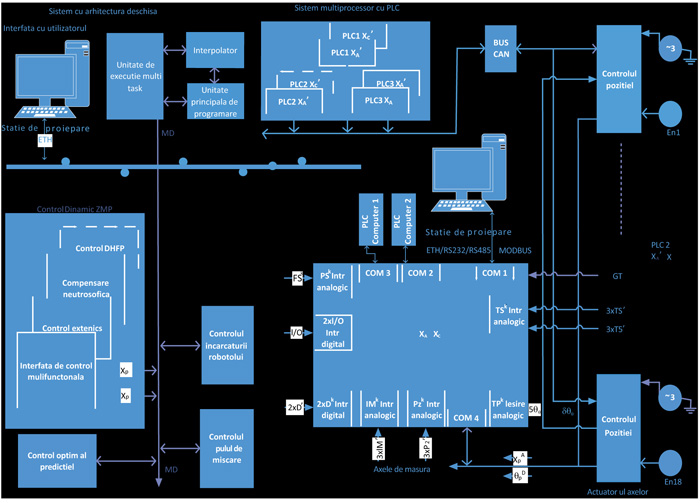 ) comprises of units of 3D VIPRO stage calculated effort in an exposed design with factual time switch [6D. Mitroi, "Contributions to new control strategies for autonomous mobile robots using artificial intelligence", Ph.D. dissertation, Institute of Solid Mechanics, Romanian Academy, .]. Intelligent switch boundaries use progressive switch tactics grounded on synthetic intelligence systems improved to the category of robot and to the functional setting. The used categories of switch are: lengthy switch (extenics), neutrosophic switch, anthropological adaptive switch and these switch categories are applied using IT&C actual period, quick dispensation infrastructures. On the VIPRO stage, the subsequent boundaries were calculated: lengthy switch boundary, robot neutrosophic switch boundary and neural webs boundary for power-location fusion dynamic switch [1C.Y. Yang, and W. Cai, Extension Engineering., Science Press: Beijing, .], [6D. Mitroi, "Contributions to new control strategies for autonomous mobile robots using artificial intelligence", Ph.D. dissertation, Institute of Solid Mechanics, Romanian Academy, .-9F. Smarandache, Extenics in Higher Dimensions., Institute of Extenics and Innovation Methods, Guangdong University of Technology: Guangzhou, China, .].
) comprises of units of 3D VIPRO stage calculated effort in an exposed design with factual time switch [6D. Mitroi, "Contributions to new control strategies for autonomous mobile robots using artificial intelligence", Ph.D. dissertation, Institute of Solid Mechanics, Romanian Academy, .]. Intelligent switch boundaries use progressive switch tactics grounded on synthetic intelligence systems improved to the category of robot and to the functional setting. The used categories of switch are: lengthy switch (extenics), neutrosophic switch, anthropological adaptive switch and these switch categories are applied using IT&C actual period, quick dispensation infrastructures. On the VIPRO stage, the subsequent boundaries were calculated: lengthy switch boundary, robot neutrosophic switch boundary and neural webs boundary for power-location fusion dynamic switch [1C.Y. Yang, and W. Cai, Extension Engineering., Science Press: Beijing, .], [6D. Mitroi, "Contributions to new control strategies for autonomous mobile robots using artificial intelligence", Ph.D. dissertation, Institute of Solid Mechanics, Romanian Academy, .-9F. Smarandache, Extenics in Higher Dimensions., Institute of Extenics and Innovation Methods, Guangdong University of Technology: Guangzhou, China, .].
VIPRO stage is a multifaceted expedient which permits expansion of innovative switch, elastic moveable boundaries in a replicated setting that can be authenticated on a corporeal scheme. Corporeal schemes are essentially actual period controlled robots or mechatronic structures proficient of substituting anthropological machinists in extremely hazard regions. Switch boundaries have remained the focus for researches in robotics and the outcomes never ceased to perform. Fragment of these outcomes were the mechatronics structures with discovery, conveyance and management competences for an assortment of claim.
In this framework, it is essential to mimic mechatronic structures and to select their appropriate procedures as well.
Moveable robot’s 3D replication has to mimic the actual scheme subtleties and the setting, as precise as conceivable. Alternative feature to be booked into account when the 3D model is produced is the collaboration among several mechatronic structures that can resolve the vigorous for the innovative resulted scheme [10S. Florentin, and V. Victor, "Applications of extenics to 2D-space and 3D-space", Proc. The 6th Conference on Software, Knowledge, Information Management and Applications, USA, pp. 9-11., 11F. Smarandache, Generalizations of the distance and dependent function in extenics to 2D, 3D, and n-D, . http:// vixra. org/ abs/ 1206. 0014 and http:// vixra. org/ pdf/ 1206. 0014v1 .pdf].
3. EXTENICS INTELLIGENT SWITCH BOUNDARIES
Extenics, the actual switch technique is incorporated into this kind of boundary. The concept overdue this technique is the concept of the similar name, Extenics, system that aids to resolve conflicting glitches. It is why it is practical in protracted scheme control by relating metrics and dependences function, well-defined by extenics reasoning. The inventor or this technique is Prof. Cai Wen [1C.Y. Yang, and W. Cai, Extension Engineering., Science Press: Beijing, ., 2W. Cai, "Extension set and non-compatible problems", Advances in Applied Mathematics and Mechanics in China., International Academic Publishers: Peking, pp. 1-21.] from Guangdong University in 1983. Succeeding reiteration, with noteworthy contributions has been made by Prof. Smarandache, the University of New Mexico, USA and Prof. Şandru, the Polytechnic University of Bucharest, joint partners of the research team of the [12F. Smarandache, and L. Vlădăreanu, "Applications of neutrosophic logic to robotics - An introduction", Proc. the 2011 IEEE International Conference on Granular Computing, IEEE: Kaohsiung Taiwan, pp. 607-612.
[http://dx.doi.org/10.1109/GRC.2011.6122666] ] project VIPRO, Developments contain in changeover as of an l-dimension laniary planetary to an n-dimension laniary interplanetary [9F. Smarandache, Extenics in Higher Dimensions., Institute of Extenics and Innovation Methods, Guangdong University of Technology: Guangzhou, China, .]. See Fig. (1) below:
 |
Fig. (1) 3D VIPRO stage - Open design structure using intellectual boundaries. |
It was resolved clashing power-location switch of robot gesture in actual period using VIPRO stage. It has thus been lengthy switch of the fusion kind used power-location - eHFPC, the technique industrialized by Prof. Vlădăreanu [3O. Șandru, L. Vlădăreanu, P. Șchiopu, V. Vlădăreanu, and A. Șandru, "New progress in extenics theory", First International Symposium of Exten, Beijing, ., 7O.I. Şandru, L. Vlǎdǎreanu, P. Şchiopu, V. Vlǎdǎreanu, and A. Şandru, "Multidimensional extenics theory", U.P.B. Sci. Bull., vol. 75, no. 1, pp. 3-12. ISSN 1223-7027., 9F. Smarandache, Extenics in Higher Dimensions., Institute of Extenics and Innovation Methods, Guangdong University of Technology: Guangzhou, China, ., 12F. Smarandache, and L. Vlădăreanu, "Applications of neutrosophic logic to robotics - An introduction", Proc. the 2011 IEEE International Conference on Granular Computing, IEEE: Kaohsiung Taiwan, pp. 607-612.
[http://dx.doi.org/10.1109/GRC.2011.6122666] ]. Actual procedure encompasses switch boundary application of the original technique [4V. Vlădăreanu, P. Schiopu, M.C. Deng, and H.N. Yu, "Intelligent extended control of the walking robot motion", Proc. of the 2014 International Conference on Advanced Mechatronic Systems, IEEE: Kumamoto, Japan, pp. 489-495.
[http://dx.doi.org/10.1109/ICAMechS.2014.6911594] ] in the VIPRO stage.
The intellectual boundary for lengthy switch (ICEx) advances an innovative element of intellectual boundary, the protracted switch (Extenics) order to increase DHFPC switch rapid recital of moveable robots. Applying clashing glitches resolving methods (Extenics) in a vague planetary is primary to a novel innovative solicitation for the VIPRO stage, obtainable below, which permits exhibiting and application of an innovative switch technique of moveable robots.
Exhibiting switch methods grounded on Extenics and nD interplanetary standards. It is expected that we devise a robotic application resolute by an effort space of a mechatronic machine which comprises a prompt, bi-dimensional allusion - on (x, y) axes - distinct as bull's eye for the robotic end-effector.
For the actuators switch we adopt the practice of a lengthy switch which gears the ideas accessible in Extenics concept. To realize it, it is essential to distinguish the need function, premeditated in a multidimensional terrestrial to estimate the mismatch level that will be used in choosing the actuator intensity response. This procedure will be explained in detail in the units devoted to lengthy switch. To mimic robotic interplanetary, it is essential to compute the reliance function for multidimensional cases.
By means of concepts industrialized in analogous by instructors Smarandache and Şandru, concerning n-dimensional seats function, we get a unitary appearance of the reliance function for the calculated case. Preliminary with the orientation point R(xr,yr) which is the best opinion for the measured location of the actuator, we have a putative orientation interlude X0 and an adequate interlude X and for both of them, the orientation is R [3O. Șandru, L. Vlădăreanu, P. Șchiopu, V. Vlădăreanu, and A. Șandru, "New progress in extenics theory", First International Symposium of Exten, Beijing, ., 4V. Vlădăreanu, P. Schiopu, M.C. Deng, and H.N. Yu, "Intelligent extended control of the walking robot motion", Proc. of the 2014 International Conference on Advanced Mechatronic Systems, IEEE: Kumamoto, Japan, pp. 489-495.
[http://dx.doi.org/10.1109/ICAMechS.2014.6911594] , 10S. Florentin, and V. Victor, "Applications of extenics to 2D-space and 3D-space", Proc. The 6th Conference on Software, Knowledge, Information Management and Applications, USA, pp. 9-11., 11F. Smarandache, Generalizations of the distance and dependent function in extenics to 2D, 3D, and n-D, . http:// vixra. org/ abs/ 1206. 0014 and
http:// vixra. org/ pdf/ 1206. 0014v1 .pdf].
To discover lengthy pointers appearance we will deliberate two areas of a bi-dimensional interplanetary. The two regions agree to interplanetary differences on x and y axis. For any point P(x¬P,yP) it can be premeditated (giving by Prof. Smarandache) the protracted 2D detachments connected to existing intermissions:
 |
(1) |
The resultant reliance function is displayed underneath:
 |
(2) |
where P is selected to be external of X0, but encompassed in X and the outcome is a undesirable dependency subunit function (function denominator is negative). If it fit to the X0, k(Q) would be designed in the similar method, but the outcome would be constructive, and if P would be exterior of X, the reliance function would be lesser than -1.
The worth of the reliance function in the point P will be the lengthy aloofness in 2D interplanetary amid the idea and the adjacent boundary, alienated by the variance amid the point and the large interlude, in one lateral, and the aloofness among the point and the minor interlude, on the supplementary lateral. All these reserves are booked on the mark among the optimum point R(x, y) and the selected point P(xP, yP).
Rendering to Vlădăreanu-Smarandache technique [10S. Florentin, and V. Victor, "Applications of extenics to 2D-space and 3D-space", Proc. The 6th Conference on Software, Knowledge, Information Management and Applications, USA, pp. 9-11.] (F. Smarandache, L. Vlădăreanu, 2012) it will control modules on facts on sheer by the similar worth for the reliance function in this interplanetary, since the concluding face will not be contingent on the y coordinate worth in the designated idea. For any point Q(xQ, yQ) will effect a final look, related to the preceding one [3O. Șandru, L. Vlădăreanu, P. Șchiopu, V. Vlădăreanu, and A. Șandru, "New progress in extenics theory", First International Symposium of Exten, Beijing, .], where
This region will regulate modules of level points with the identical worth of reliance function. Consequently, it can be experiential that, for such a repartition of the lengthy intermission which remains the center of the reliance function, the bi-dimensional issue can be divided into two one-dimensional characteristic glitches.
 |
(3) |
With reference to Koram, S. S. et al. [5K. Samuel, B. Korankye, and G. Kweitsu, "Seismic response analysis of underground structures", J. Enviro. Earth Sci, vol. 8, no. 5, pp. 48-63.], to advance robotic mechanism, as well as salvage ones, by means of the VIPRO computer-generated robot stage, it has been industrialized the new and efficient exemplary for intellectual boundary of lengthy mechanism (ICEx) as a graphic claim that can be named after confined or distant VIPRO stage. The claim permits replication, challenging and optimization of lengthy mechanism approaches for VIPRO scheme. The claim is industrialized in Matlab software design language, using graphic advance apparatuses to project a novel user boundary taking into deliberation vague/extenics displaying apparatuses from Matlab. In Fig. (2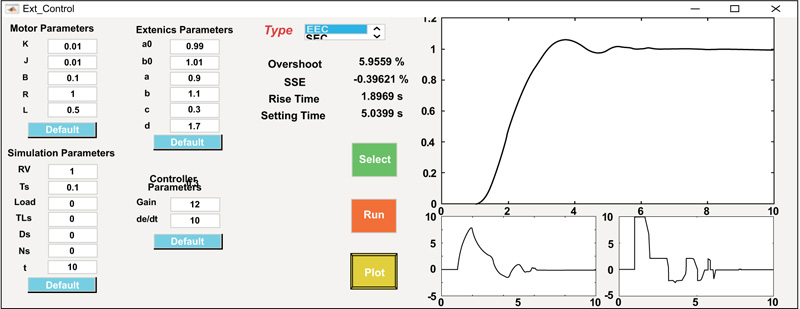 ), graphical rudiments and switch keys are offered.
), graphical rudiments and switch keys are offered.
For the respective group of constraints, there is a choice to upload a set of ordinary standards for fast testing of the boundary or happenings to precise any cypher faults (germs).
Bounds used to track the replication, which will be encumbered in Simulink, are:
- RV: The reference value (an ascending feature for regulator interplanetary).
- Ts: The incessant procedure discretization (period model).
- Weight: The appliance weight (it can be both positive or negative).
- TLs: The period once the weight is realistic.
- Ds: The scheme uproar practical on the regulator value.
- Ns: The scheme sound functional on the response circle.
t: replication period
Distinguishing constraints for a lengthy controller can be stated, i.e. the interludes essential lengthy regulator regions:
 |
- a0: Left-hand boundary of the compatibility region.
- b0: Accurate boundary of the compatibility region.
- a: Left-hand boundary of the transmuting region.
- b: Accurate boundary of the altering region.
- c: Left-hand boundary of the mismatch region.
- d: Accurate boundary of the mismatch region.
The claim will run the model with the limits set in the preceding phases (Fig. 3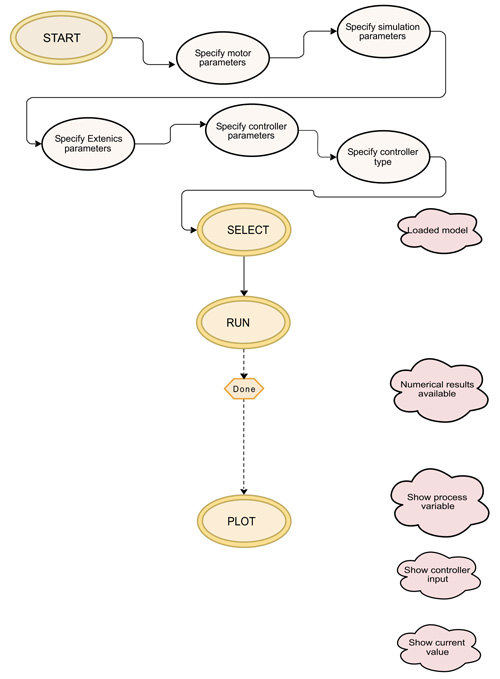 ). As this is an extenics request, i.e. a vague application, it is essential to track the model in Simulink by running the “sim” expertise (see with the particulars about the cypher).
). As this is an extenics request, i.e. a vague application, it is essential to track the model in Simulink by running the “sim” expertise (see with the particulars about the cypher).
 |
Fig. (2) Lengthy switch boundary. |
 |
Fig. (3) Claim procedure illustration. |
Consequently, the initial run of information customary will be leisurelier owing to the period it receipts for Simulink, which innings in contextual, to reset, unfluctuating this request is not noticeable or obtainable any means to the operator.
Deprived of the statistics gotten by running the replication, the outcome batons cannot be shown, and trying to envisage the structure will result in a miscalculation. Consequently, it is significant for the operator to be informed once the dispensation is accomplished by inaugurating an innovative gap with “Complete” memorandum.
At that stage, the earlier deliberated pointers are mechanically designed and exhibited and it is conceivable to envisage the outcomes by pressing “Plan or Plot” key.
The initial run of a statistics customary will consequently be sluggish owing to the period it receipts for Simulink to run in the contextual, even if the solicitation is not evident or accessible to the operator in somewhat manner.
It can be perceived that the solicitation has a lined and spontaneous manner of functioning, whereas at the similar period creating easier this kind of working with this category of modeling, which can be intricate in a formless work setting, particularly in view of the essential for parameterization and lengthy modeling of this category of solicitation.
4. THE STRUCTURE CYPHER FOR EXTENICS REGULATOR REPLICATION AND AUTHENTICA- TION (ICEX)
An extenics submission, in the setting of the contemporary enactment, is grounded on fuzzy regulator, adapting controller interplanetary rendering to extenics standards, in both alternatives of controllers investigated so far. Fig. (4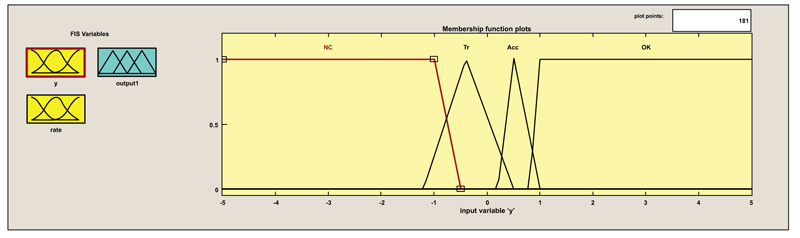 ) displays an outlook of the fuzzy sense portion of the existing solicitation. The indistinct operation allied with this category of controller has a modest instruction base, essentially an alteration from the blunder interplanetary hooked on the mismatch planetary by means of the allowances cataloging. The ultimate result is extra of a levelling output with fuzzy lucidity (fuzzy levelling) being earlier to the calculated standards of extenics, and as a result to the standard method of solving a largely mismatched problem in extenics.
) displays an outlook of the fuzzy sense portion of the existing solicitation. The indistinct operation allied with this category of controller has a modest instruction base, essentially an alteration from the blunder interplanetary hooked on the mismatch planetary by means of the allowances cataloging. The ultimate result is extra of a levelling output with fuzzy lucidity (fuzzy levelling) being earlier to the calculated standards of extenics, and as a result to the standard method of solving a largely mismatched problem in extenics.
Improved Lengthy Controller (ILC or EEC) enhances an innovative effort dimension, the weight derivate. The directive base is, of development, extra complicated and engrossed on the marginal act of the controller, and there can be no solid categorization in the usual aptitude of an extenics problem. This regulator is a transferred in the direction of a standard regulator, where the core entry, which remains the fault for the progression mutable, is demonstrated rendering to the guidelines used in extenics.
Fig. (5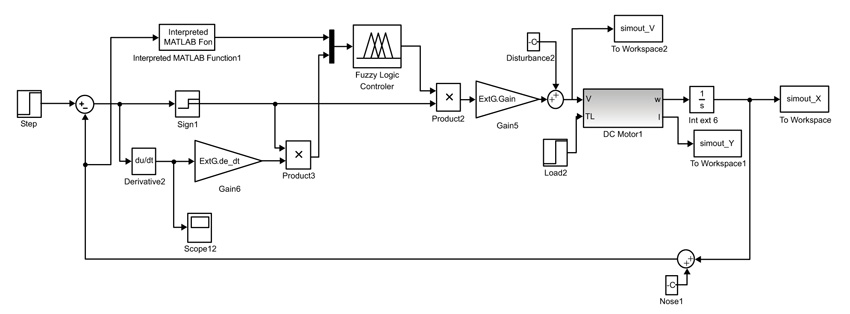 ) demonstrates the Simulink displaying structure for the improved lengthy regulator. The edifice encumbered in the runtime recollection comprises the diverse categories of fuzzy edifices likely for the two applications. Though it might have been conceivable to unswervingly choose one of them by the operator, the present form of the solicitation mechanically runs the top fuzzy implication alternative for each selection, contingent on the operator's choice.
) demonstrates the Simulink displaying structure for the improved lengthy regulator. The edifice encumbered in the runtime recollection comprises the diverse categories of fuzzy edifices likely for the two applications. Though it might have been conceivable to unswervingly choose one of them by the operator, the present form of the solicitation mechanically runs the top fuzzy implication alternative for each selection, contingent on the operator's choice.
As of the working setting boundaries, an intricate fuzzy solicitation cannot be run completely from the cypher, but needs an undertaking form. The statistics gotten from this model can, though, be encumbered straight into an adjustable that can be named by the application.
Grounded on this standards vector, the controls are essential to determine recital pointers can be complete, and then to envisage the values of concentration in the visuals inside the application.
 |
Fig. (4) Structure of fuzzy variable associated with the extended control space. |
 |
Fig. (5) Regulator system using drawn-out controller. |
CONCLUSION
To conclude, this study has elaborated on how robots work and of course how they can be used in place of human beings to execute tedious works in factories and industries. Characteristically, in order to transport or move the subdivisions of a robot in two directions, it often uses pistons that are capable of pushing in both directions. The robot's CPU pedals the whole thing attached to the circuit. Meanwhile in other to move the robot, the CPU controls on all the required engines and valves. Likewise, records have proven the diverse use of robots. In engineering, several works in factories are messed up and dirty. Dirty errands possibly will comprise welding, grinding, decoration and molding. Once robots are employed to accomplish these errands, it permits human employees to assist in extra eloquent and imaginative pursuits. Most robots nowadays are employed to do tedious works well-thought-out to be too precarious for humans. A robot is best for going into a structure that probably has a bomb. Robots are also employed in workshops to build cars, candy bars, and microelectronics among others. Robots are excessive tools to aid mankind. The VIPRO boundary is a software solicitation that permits the operator to contact and advance several actual period regulator agendas in replication setting, in simulated setting and/or in factual setting. In edict to check and authenticate the advanced switch technique in a factual setting in the simulated environs / simulated authenticity, the machinist can attach to the VIPRO stage, which is fortified with three stroke servomotors, three weight servomotors six incidence converters stand-in as high accuracy positioning controls, all of these being actual period measured by the PLC system with programmable sense regulators. The operator can also link to NAO robot, which is a constituent of the VIPRO stage to check the regulatory laws established by the operator.
Molding a robotic workspace using ideas from Extenics Concept contributes to the growth of a novel category of advanced regulator for robot actuators. The benefits of lengthy controller are noteworthy through the absence of additional intricacy in project or application. The regulator design is very candid, when the function translator is recognized. Whereas the place and boundaries of the protracted sets need to be stated and might include approximately satisfactory alteration, their optimization is not dynamic, and flawlessly fine outcomes can be gotten with modest and instinctive standards.
Starting as of the hypothetical border and having supports the basic-element concept, allowance set system and allowance sense, the useful and tentative exemplary for robot Extenics replications practical on VIPRO Stage is leading to the expansion of an advanced element in simulated intellect arena, the lengthy switch (Extenics), to advance the rapid recital of DHFPC regulator of moveable robots.
For resolving clashing glitches is industrialized a progressive technique in the wave regulator of independent robots by applying allowance system on a multi-dimensional interplanetary. The attained outcomes lead to the expansion of an approach that permits locating high side by side outcomes for robot gesture regulator by means of lengthy alterations onto the extension set and an optimization function produced by the lengthy dependency function in multidimensional interplanetary in contrast with the standard technique using consecutive lucidity matrices.
CONSENT FOR PUBLICATION
Not applicable.
CONFLICT OF INTEREST
The authors declare no conflict of interest, financial or otherwise.
ACKNOWLEDGMENTS
This work was industrialized by the upkeep of MEN-UEFISCDI, PN-II-PT-PCCA-2013-4, VIPRO scheme No.009/2014-2017, Romanian College, “Combined Workshop of Intellectual Reintegration Robot” cooperative investigation contract between Romanian College by IMSAR, RO and Jiangsu University, China. This work was also financially supported by Samuel Sakyi Koram a Ph.D. in Solid Mechanics student with the Faculty of Civil Engineering and Mechanics, Jiangsu University, Zhenjiang - China. Moreover, I’d like to express my heartfelt gratitude to my current supervisor in the person of Professor Jian-Fei Lu of the Faculty of Civil Engineering and Mechanics, Jiangsu University, Zhenjiang- China for his remarkable, noteworthy contributions and advice to make this a success.
REFERENCES
| [1] | C.Y. Yang, and W. Cai, Extension Engineering., Science Press: Beijing, . |
| [2] | W. Cai, "Extension set and non-compatible problems", Advances in Applied Mathematics and Mechanics in China., International Academic Publishers: Peking, pp. 1-21. |
| [3] | O. Șandru, L. Vlădăreanu, P. Șchiopu, V. Vlădăreanu, and A. Șandru, "New progress in extenics theory", First International Symposium of Exten, Beijing, . |
| [4] | V. Vlădăreanu, P. Schiopu, M.C. Deng, and H.N. Yu, "Intelligent extended control of the walking robot motion", Proc. of the 2014 International Conference on Advanced Mechatronic Systems, IEEE: Kumamoto, Japan, pp. 489-495. [http://dx.doi.org/10.1109/ICAMechS.2014.6911594] |
| [5] | K. Samuel, B. Korankye, and G. Kweitsu, "Seismic response analysis of underground structures", J. Enviro. Earth Sci, vol. 8, no. 5, pp. 48-63. |
| [6] | D. Mitroi, "Contributions to new control strategies for autonomous mobile robots using artificial intelligence", Ph.D. dissertation, Institute of Solid Mechanics, Romanian Academy, . |
| [7] | O.I. Şandru, L. Vlǎdǎreanu, P. Şchiopu, V. Vlǎdǎreanu, and A. Şandru, "Multidimensional extenics theory", U.P.B. Sci. Bull., vol. 75, no. 1, pp. 3-12. ISSN 1223-7027. |
| [8] | L. Vladareanu, G. Tont, I. Ion, V. Vladareanu, and D. Mitroi, "Modeling and hybrid position-force control of walking modular robots", ISI Proceedings, Recent Advances in Applied Mathematics, pp. 510-518. |
| [9] | F. Smarandache, Extenics in Higher Dimensions., Institute of Extenics and Innovation Methods, Guangdong University of Technology: Guangzhou, China, . |
| [10] | S. Florentin, and V. Victor, "Applications of extenics to 2D-space and 3D-space", Proc. The 6th Conference on Software, Knowledge, Information Management and Applications, USA, pp. 9-11. |
| [11] | F. Smarandache, Generalizations of the distance and dependent function in extenics to 2D, 3D, and n-D, . http:// vixra. org/ abs/ 1206. 0014 and http:// vixra. org/ pdf/ 1206. 0014v1 .pdf |
| [12] | F. Smarandache, and L. Vlădăreanu, "Applications of neutrosophic logic to robotics - An introduction", Proc. the 2011 IEEE International Conference on Granular Computing, IEEE: Kaohsiung Taiwan, pp. 607-612. [http://dx.doi.org/10.1109/GRC.2011.6122666] |